Virtual reality:
The interface of the future
Operate using virtual reality for increased safety and precision, as well as reduced costs.
What exactly is „virtual reality“?
“Virtual reality, VR for short, projects the representation and simultaneous experience of reality and its physical features into a computer-generated, interactive virtual environment in real-time.“
This is why virtual reality is the interface of the future
- Safety: working from safe spaces
- Simulation: representing reality in a simulation
- Saves expenditure: virtual realistic test environments instead of expensive test beds
- Keep your distance: define and maintain minimum separation
- Integration: collision avoidance; prevention of collisions includes fields of application such as ATEX
- Working in real-time: minimise mental stress
- Automation: planning, generation and execution of work paths is possible automatically
Convincing technical features of virtual reality:
Working in real-time means that the command to the operating elements is transmitted to the simulation almost immediately. The operator thus has direct feedback and can react intuitively to force feedback, for instance.
Virtual reality is particularly persuasive because of its:
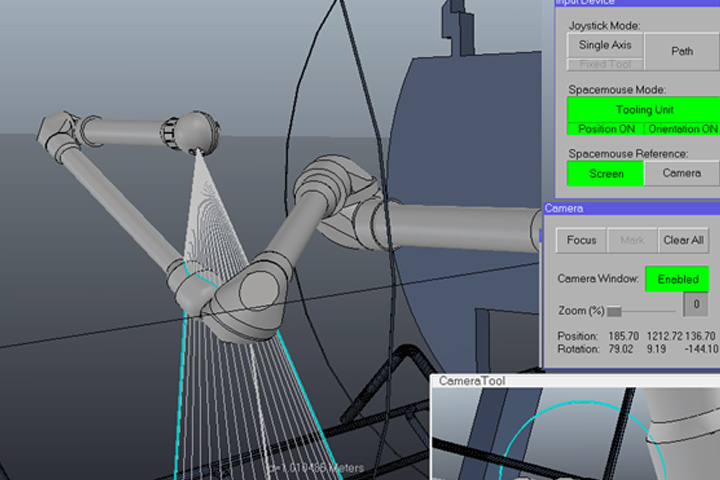
- variety of control modes e.g.
- movement of camera angle
- rotation around the mid-point of the tool respectively the gripper
- regulate minimum distance
- check and regulation of space between the arm and the environment or the arm and the arm
- automatic stop when it reaches the minimum distance
- collision monitoring
- prevents self-collision and collision between arm and environment
- can also be used between several dynamic and static objects
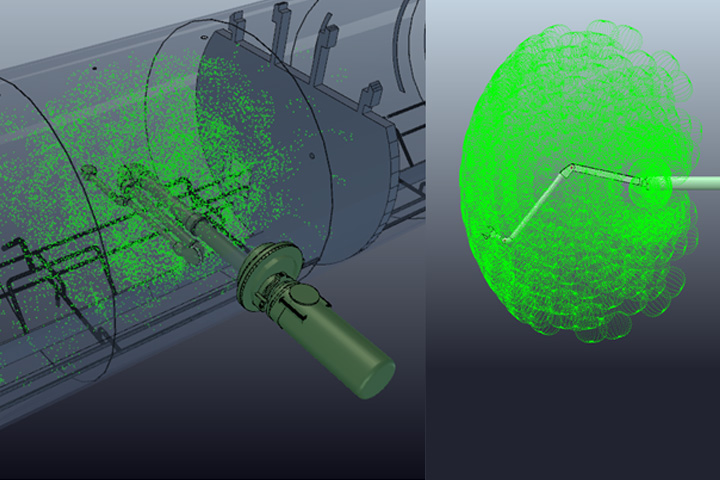
- working area pre-calculation
- feedback on attainable points by visualising a scatter plot
- facilitates visualisation of the field of vision
- paths planning
- learned points can be automatically generated as a path
- display of single points, passing through as a complete motion path
- smooths out linear and point-to-point paths
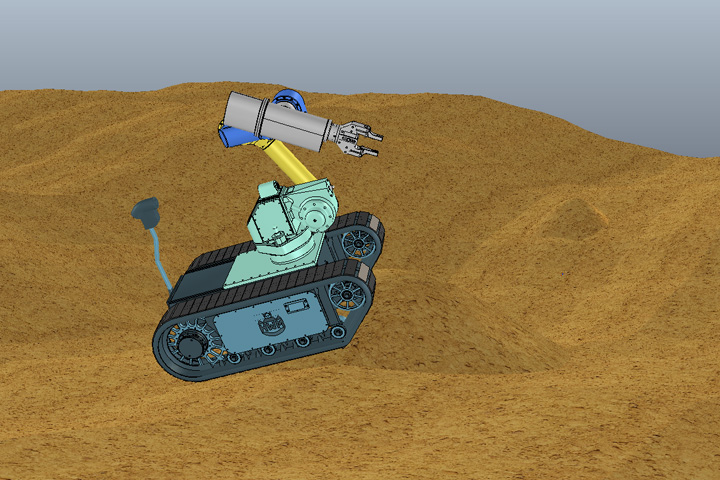
Motion, particularly in inaccessible, complex and hazardous environments can be planned, controlled and thus made safer. The motion of the manipulator respectively of the robot is tangibly more precise and tasks are implemented noticeably more quickly and efficiently.
Obvious cost savings with virtual test environments
- save on complex test beds:
Up to now sensitive assignments were tested and trained on complex test beds. Commissioning these systems takes time and is therefore very cost-intensive. With virtual reality a test environment that is close to reality can be created quickly and more cheaply. - virtual test bed:
The test environment can be virtually constructed in a very short space of time. Planned operations can be trained as often as necessary without the risk of injury, damage or wear. As a result, no manipulators or robots are used for training: A further factor in noticeable cost savings.

High safety and reduced mental stress
With the motto „Practice makes perfect“ operating personnel can practice in a virtual reality environment until they are confident. Practise safely with virtual reality:
- avoids damage to equipment, vessel and robot
- avoids potential injury to personnel
- avoids potentially hazardous situations (e.g. ATEX)
Users also benefit from the advantages generated by virtual reality. You are no longer under pressure in the workplace because you might damage an expensive vessel or piece of equipment. This burden is taken over by simulations, collision detection and minimum distance regulators. The user thus experiences a feeling of safety and gains in self-confidence and well-being.
It is obvious, then, that virtual reality not only unburdens the user but can also make massive savings in cost and a clear contribution to much increased workplace safety.
Find out more about the operating possibilities using virtual reality from your HWM contact person! >
* Source: https://de.wikipedia.org/wiki/Virtuelle_Realit%C3%A4t, last visited 23.4.2018
